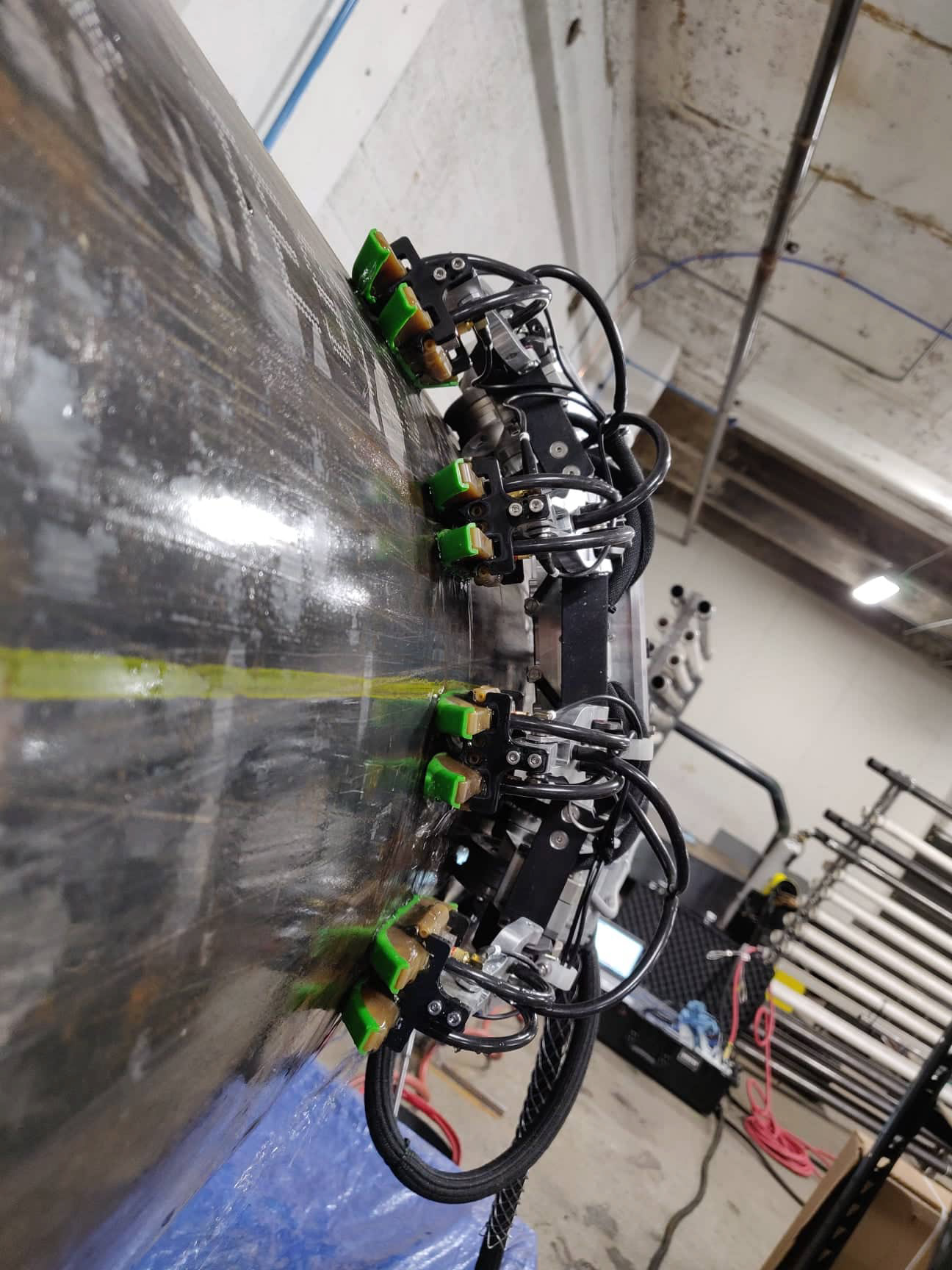
At Gecko Robotics I developed robotic hardware for industrial inspection automation.
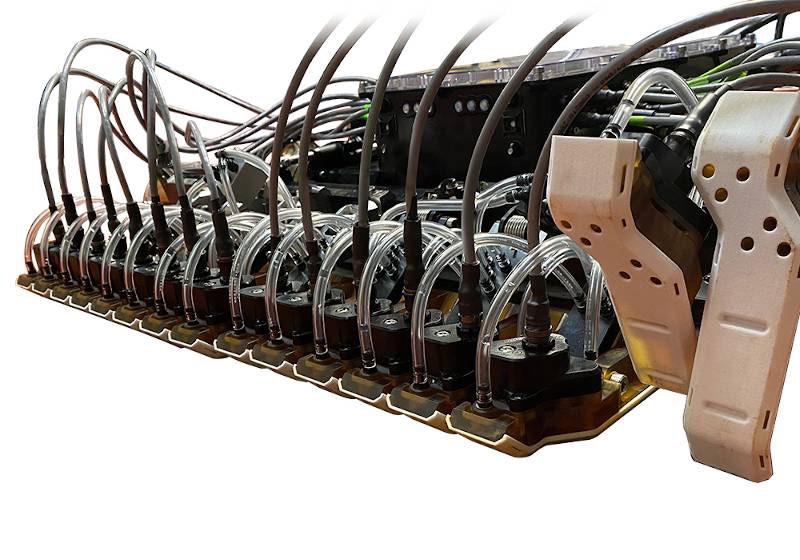
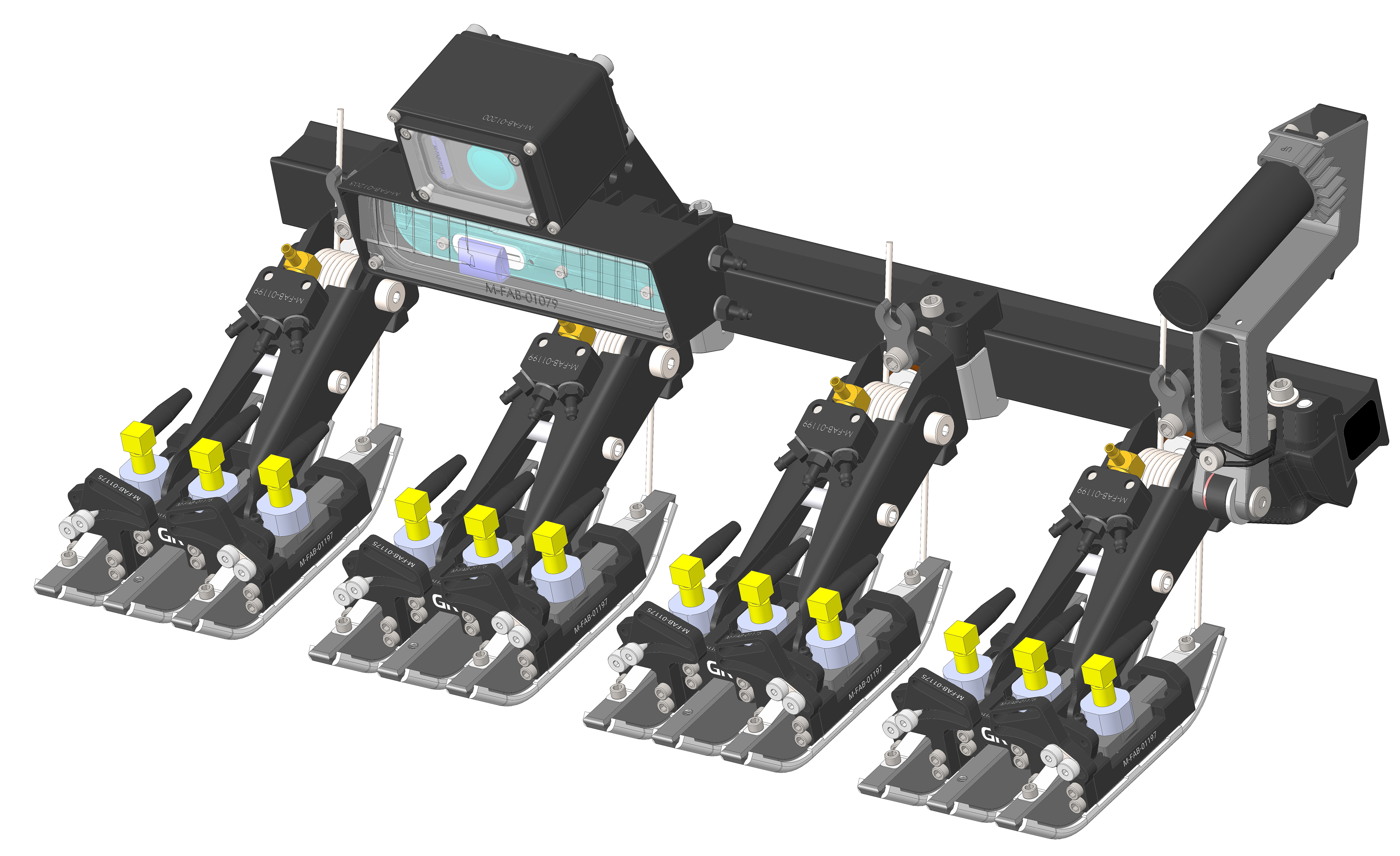
I primarily worked on non-destructive testing sensor integration - including Conventional UT & Advanced UT, Laser Profilometry, and Magnetic Induction payloads.
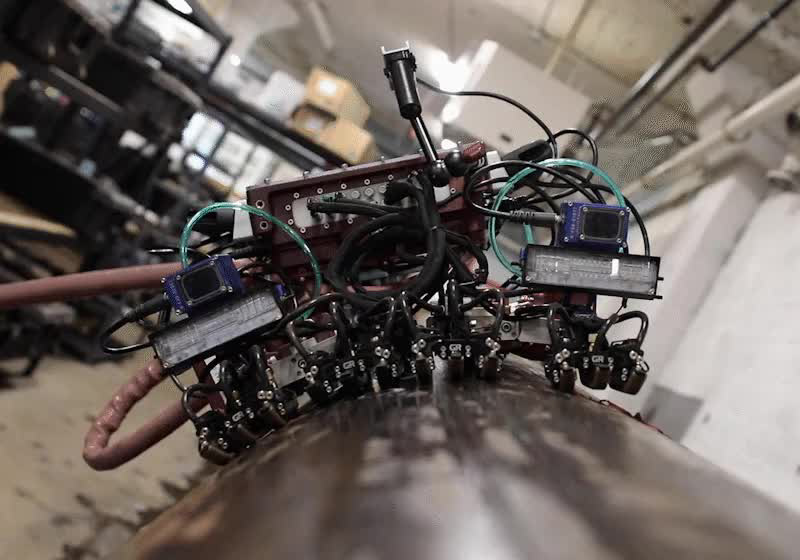
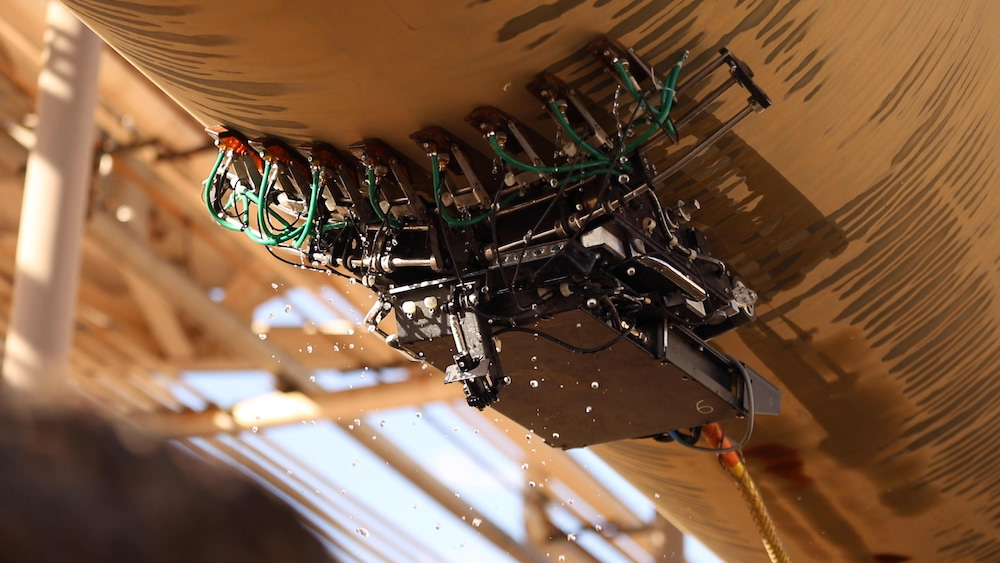
I was also involved with developing robot system architectures - including TOKA, EVA, and MOOR robot platforms.